








自动喷砂房感应系统的相关解析
自动喷砂房的感应系统是实现无人化喷砂作业的核心,通过合理检测工件位置、形状及运行状态,控制喷砂设备自动调整参数,确保喷砂均匀性与效率。其设计需结合工件特性、喷砂工艺及场地环境,实现 “感知 - 判断 - 执行” 的闭环控制,既减少人工干预,又避免喷砂过度或遗漏,是自动化喷砂生产线的关键技术支撑。
The induction system of the automatic sandblasting room is the core of achieving unmanned sandblasting operations. By accurately detecting the position, shape, and operating status of the workpiece, the sandblasting equipment is controlled to automatically adjust parameters, ensuring the uniformity and efficiency of sandblasting. Its design needs to combine the characteristics of the workpiece, sandblasting process, and site environment to achieve a closed-loop control of "perception judgment execution", which reduces manual intervention and avoids excessive or missed sandblasting. It is a key technical support for automated sandblasting production lines.
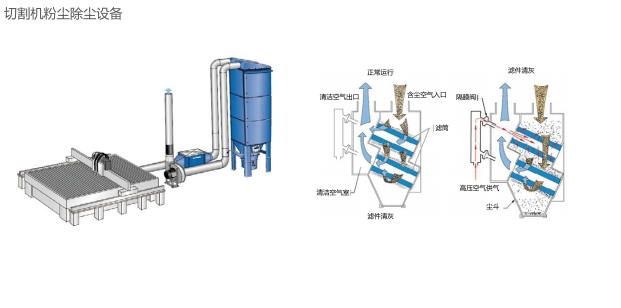
感应系统的核心构成包括检测元件、信号处理单元与联动控制模块。检测元件负责捕捉工件信息,常见的有光电传感器、超声波传感器及激光扫描仪:光电传感器通过光线遮挡判断工件是否进入喷砂区域,响应速度快,适合小型规则工件的定位;超声波传感器利用声波反射测量工件距离与轮廓,不受粉尘、光线影响,适用于复杂形状工件的检测;激光扫描仪可三维建模工件外形,合理识别拐角、凹槽等细节,为大型异形工件(如机械结构件)的喷砂路径规划提供数据支持。信号处理单元对传感器采集的信息进行分析,剔除粉尘干扰导致的误信号(如通过滤波算法保留连续稳定的信号),转化为控制指令。联动控制模块将指令传递给喷砂机械臂、输送系统及砂料供给装置,实现喷砂枪角度、移动速度、砂料流量的实时调整。
The core components of the induction system include detection elements, signal processing units, and linkage control modules. Detection components are responsible for capturing workpiece information, commonly including photoelectric sensors, ultrasonic sensors, and laser scanners. Photoelectric sensors use light obstruction to determine whether the workpiece has entered the sandblasting area, with fast response speed and suitable for positioning small and regular workpieces; Ultrasonic sensors use sound wave reflection to measure the distance and contour of workpieces, which are not affected by dust or light, and are suitable for detecting complex shaped workpieces; Laser scanners can 3D model the shape of workpieces, accurately identify details such as corners and grooves, and provide data support for sandblasting path planning of large irregular workpieces (such as mechanical structural components). The signal processing unit analyzes the information collected by the sensor, eliminates false signals caused by dust interference (such as retaining continuous and stable signals through filtering algorithms), and converts them into control instructions. The linkage control module transmits instructions to the sandblasting robotic arm, conveying system, and sand supply device to achieve real-time adjustment of the sandblasting gun angle, movement speed, and sand flow rate.

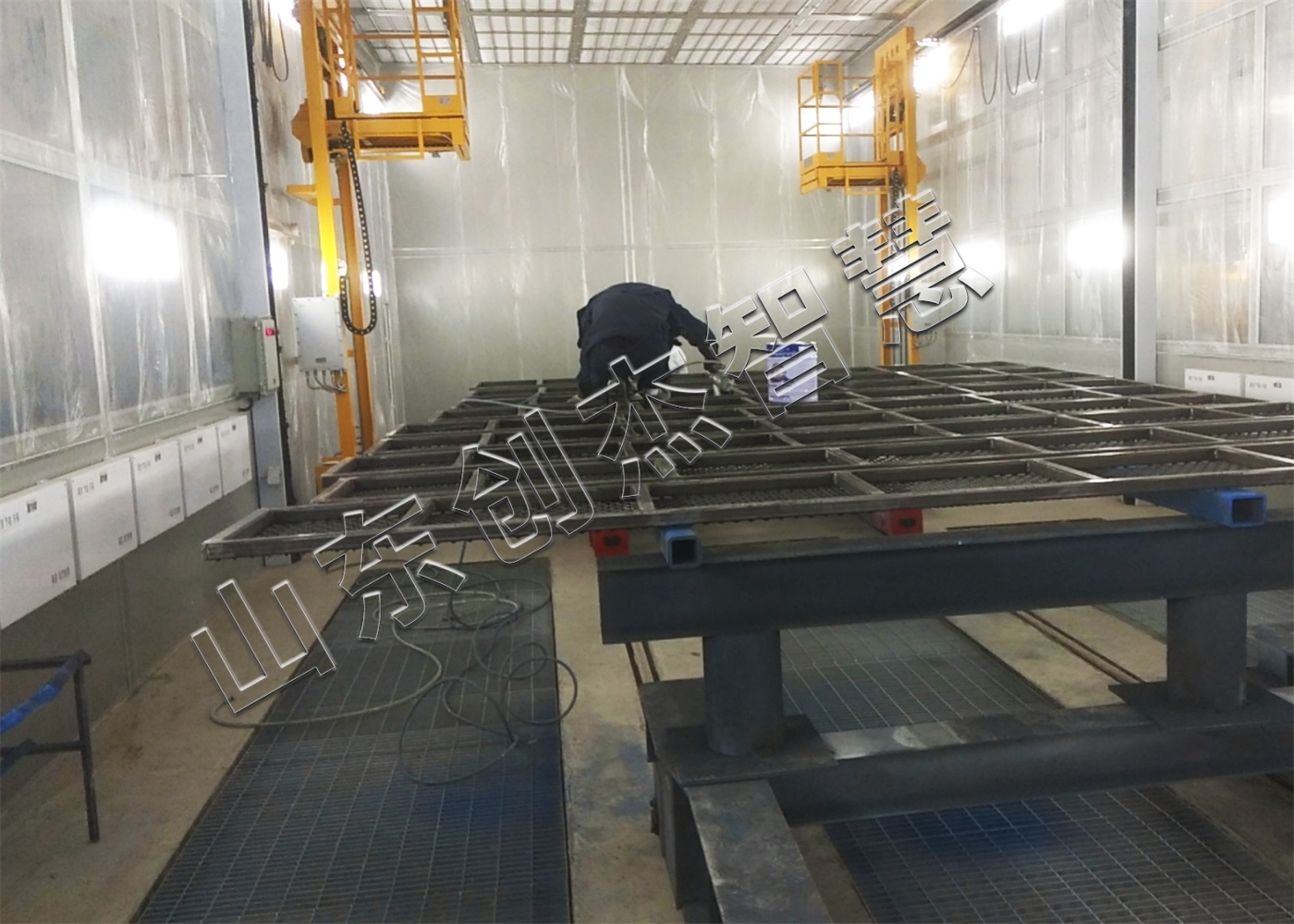
不同感应方式的适配场景需根据工件特性选择。对于批量生产的标准化工件(如板材、管材),光电感应配合编码器定位即可满足需求:通过设定固定检测点,当工件到达该位置时,系统触发喷砂枪按预设程序作业,确保每批工件处理一致性。针对多品种、小批量的异形工件,激光扫描感应更具优势,可在工件进入喷砂房后快速完成轮廓识别,自动生成喷砂路径(如优先处理表面凸起部位,再均匀覆盖平面区域),无需人工重新编程。在高粉尘环境下(如金刚砂喷砂),需选用防尘等级高的感应元件(防护等级不低于 IP65),并定期清理传感器表面的砂粒附着,避免检测精度下降。
The adaptation scenarios for different sensing methods need to be selected based on the characteristics of the workpiece. For standardized components produced in bulk, such as plates and pipes, photoelectric induction combined with encoder positioning can meet the requirements: by setting a fixed detection point, when the workpiece reaches that position, the system triggers the sandblasting gun to operate according to the preset program, ensuring consistency in processing each batch of workpieces. For multi variety and small batch shaped workpieces, laser scanning induction has more advantages. It can quickly complete contour recognition after the workpiece enters the sandblasting room and automatically generate sandblasting paths (such as prioritizing surface protrusions and evenly covering flat areas), without the need for manual reprogramming. In high dust environments (such as diamond sandblasting), it is necessary to use sensing elements with high dust prevention levels (protection level not lower than IP65), and regularly clean the sand particles adhering to the sensor surface to avoid a decrease in detection accuracy.
感应系统的联动控制逻辑直接影响喷砂质量。当感应到工件表面存在锈蚀、氧化皮等厚层杂质时,系统会自动提高砂料喷射压力(如从 0.4MPa 增至 0.6MPa),延长该区域喷砂时间;检测到薄壁或易损部位时,则降低压力并减小砂料粒度,防止工件变形或损伤。输送系统与感应系统的协同尤为关键:通过编码器实时监测工件移动速度,喷砂枪的移动速度与之动态匹配(如工件增速时,喷枪移动同步加快),避免出现喷砂重叠或漏喷。对于悬挂输送的工件,感应系统需检测吊具位置,确保喷砂枪避开吊具遮挡区域,待工件旋转或移动后再补喷,保证表面处理全覆盖。
The linkage control logic of the induction system directly affects the quality of sandblasting. When thick impurities such as rust and oxide scale are detected on the surface of the workpiece, the system will automatically increase the sand spraying pressure (such as from 0.4MPa to 0.6MPa) and prolong the sandblasting time in that area; When thin-walled or vulnerable parts are detected, reduce the pressure and decrease the sand particle size to prevent deformation or damage to the workpiece. The coordination between the conveying system and the induction system is particularly crucial: the encoder monitors the real-time movement speed of the workpiece, and the movement speed of the sandblasting gun dynamically matches it (such as synchronously accelerating the movement of the sandblasting gun when the workpiece increases in speed), avoiding sandblasting overlap or missed spraying. For suspended workpieces, the induction system needs to detect the position of the lifting device to ensure that the sandblasting gun avoids the area blocked by the lifting device. After the workpiece rotates or moves, it can be sprayed again to ensure full surface treatment coverage.
系统的抗干扰设计是稳定运行的保障,需应对喷砂房内的复杂环境。电磁干扰(如喷砂设备的电机运转)可能导致传感器信号紊乱,需采用屏蔽线缆传输信号,将控制单元与动力设备的电路分开布线。粉尘附着会影响传感器灵敏度,可在感应元件外侧加装吹扫装置(如压缩空气喷嘴),定时清理表面粉尘,或选用非接触式检测方式(如红外感应)减少物理接触。振动干扰(如喷砂作业产生的设备震动)可能导致传感器移位,安装时需采用减震支架固定,确保检测位置稳定,同时定期校准感应精度(如通过标准试块验证检测误差)。
The anti-interference design of the system is a guarantee for stable operation and needs to cope with the complex environment inside the sandblasting room. Electromagnetic interference (such as the motor operation of sandblasting equipment) may cause sensor signal disorder, and shielded cables should be used to transmit signals. The control unit and power equipment circuits should be wired separately. Dust adhesion can affect the sensitivity of sensors. A blowing device (such as a compressed air nozzle) can be installed outside the sensing element to regularly clean the surface dust, or non-contact detection methods (such as infrared induction) can be used to reduce physical contact. Vibration interference (such as equipment vibration caused by sandblasting operations) may cause sensor displacement. During installation, shock-absorbing brackets should be used to secure the detection position, ensuring stability. At the same time, the induction accuracy should be calibrated regularly (such as verifying detection errors through standard test blocks).
本文由自动喷砂房友情奉献.更多有关的知识请点击:http://www.sdcjtz.com我们将会对您提出的疑问进行详细的解答,欢迎您登录网站留言.
This article is dedicated to the automatic shot blasting machine and friendship For more information, please click: http://www.sdcjtz.com We will provide detailed answers to your questions. You are welcome to log in to our website and leave a message
上一篇:喷粉线安装定制的相关解析
下一篇:VOC废气处理工艺详解




 鲁公网安备 37142502000144号
鲁公网安备 37142502000144号